先日、4足歩行ロボットのプロジェクトを始めたことを↓の記事にしました。

このプロジェクトは、オリジナル設計の4足歩行ロボットの実機で歩行を実現することが目標ですが、いきなり実機を作成して歩行できるほど世の中は甘くない・・・
そこで、まずはシミュレータ内で、仮設計のロボットが歩行できるようにしてから実機の設計や製作に取り掛かりたいと考えています。
シミュレータで歩行を検証するには、シミュレータ内で使用する4足歩行ロボットのモデルが必要になります。モデルとしてはBoston DynamicsのSpotやUnitree Roboticsのlaikagoやa1など、インターネット上には複数存在しますが、折角なら自分で設計した4足歩行ロボットでシミュレーションを行いたいので、上のリンクの記事の最後に掲載した4足歩行ロボットのURDFを作成して実験することにしました。
※URDFとはUnified Robotics Description Formatの略で、XMLを用いてロボットを記述するためのファイル形式です。ROSで使用されるGazeboを始め、UnityやPyBulletなど、多くのシミュレータが対応しています。
ロボットはFusion 360を用いて設計し、fusion2urdfを用いてURDFを生成しました。
fusion2urdfはFusion 360で作成したCADモデルからURDFを生成するための非公式のスクリプトです。実際にfusion2urdfを使用してみると分かると思いますが、このスクリプトは第三者によって作成されたものなので、機能面で不十分な点が多いです。例えば、スクリプトを用いてURDFを生成する前に、スクリプトで正しく変換できるようにモデリングしたパーツのコンポーネントの階層構造やジョイントなどを調整する作業が必要になる可能性があります。現状では、fusion2urdfは使いにくいので、オリジナルに開発する予定です(完成したら記事にします)。
この記事では、設計した4足歩行ロボットの紹介をしていきます。また、URDFも公開しているので、ぜひ使ってみてくださいね。
※日本の4足歩行ロボット界隈を盛り上げるために(?)、このロボットを含め様々なファイルを公開していきます。今回は、その第一弾です。
ロボットの名前
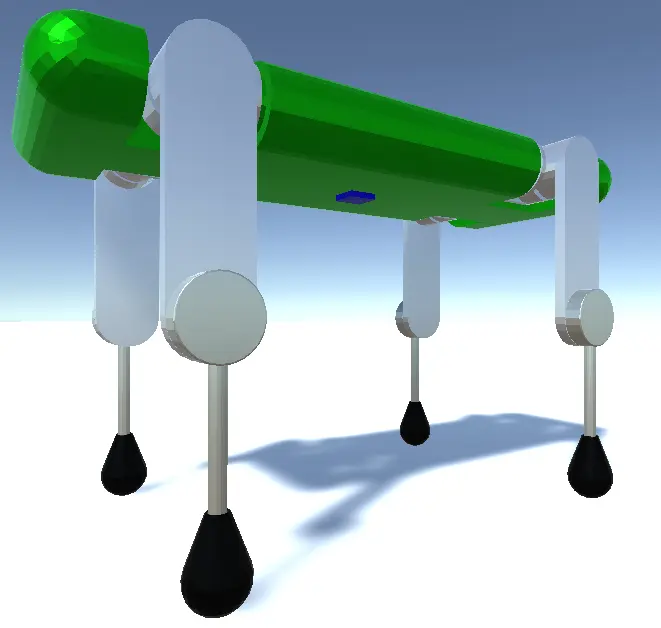
今回公開する4足歩行ロボットの外観は以下のようなものです。
シミュレータで簡単な実験を行うことを目的に設計したため、とても単純な構造をしています。
"単純な4足歩行ロボット"を英語にすると"simple quadruped walking robot"になるので、そこから適当に文字を選んで名前っぽいものを採用しました。
名前は「SimQ」(シムキュー)です!!
(SimQのsimはsimpleからとっていますが、simulatorのsimからという解釈もできそう)

ロボットのデータ
現在、SimQはURDF形式のみ公開してます。URDFが利用可能なシミュレータであれば利用できます。
(例) Gazebo、Unity、PyBullet・・・

ロボットの詳細
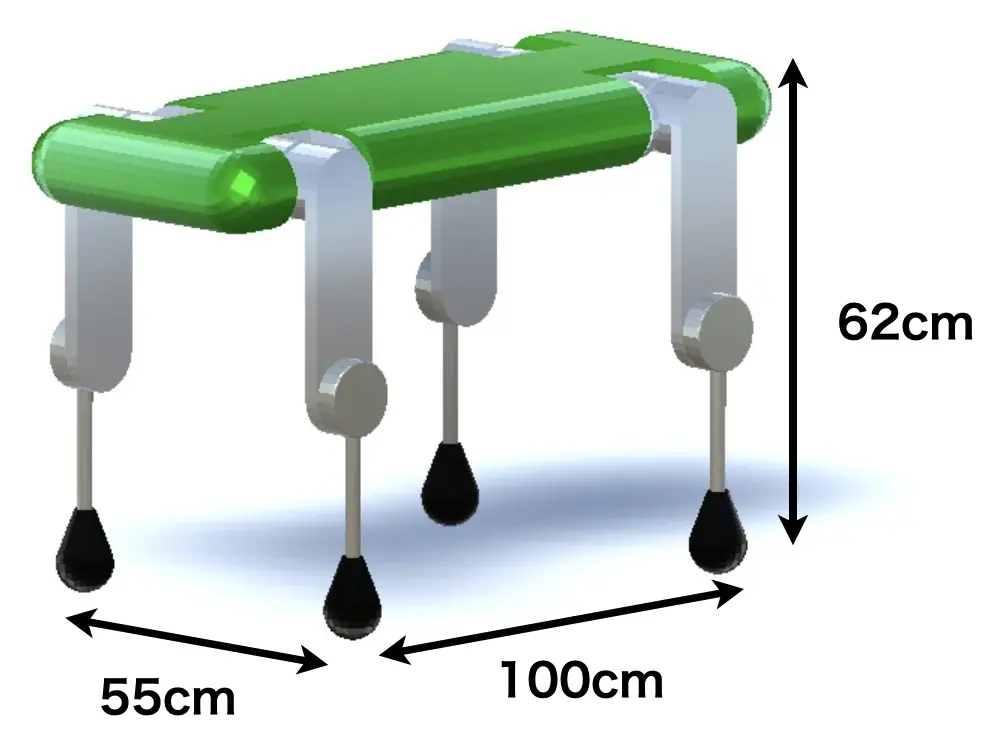
サイズ
足を鉛直方向に伸ばした状態のサイズは、横幅が55cm、縦幅が100cm、高さが62cmです。
自由度
各脚は3の自由度を持つので、SimQは12個の自由度を持ちます。
IMU
胴体の下側中心にIMUが付いています。