本日は、Aliexpressで購入した大型ドローン用のブラシレスモータを分解してみました。そのついでに色々調べてみたので、それについてもメモ的に書き残しておきたいと思います。
今回、分解したブラシレスモータはこれです↓(分解といっても、ロータを外しただけですが)
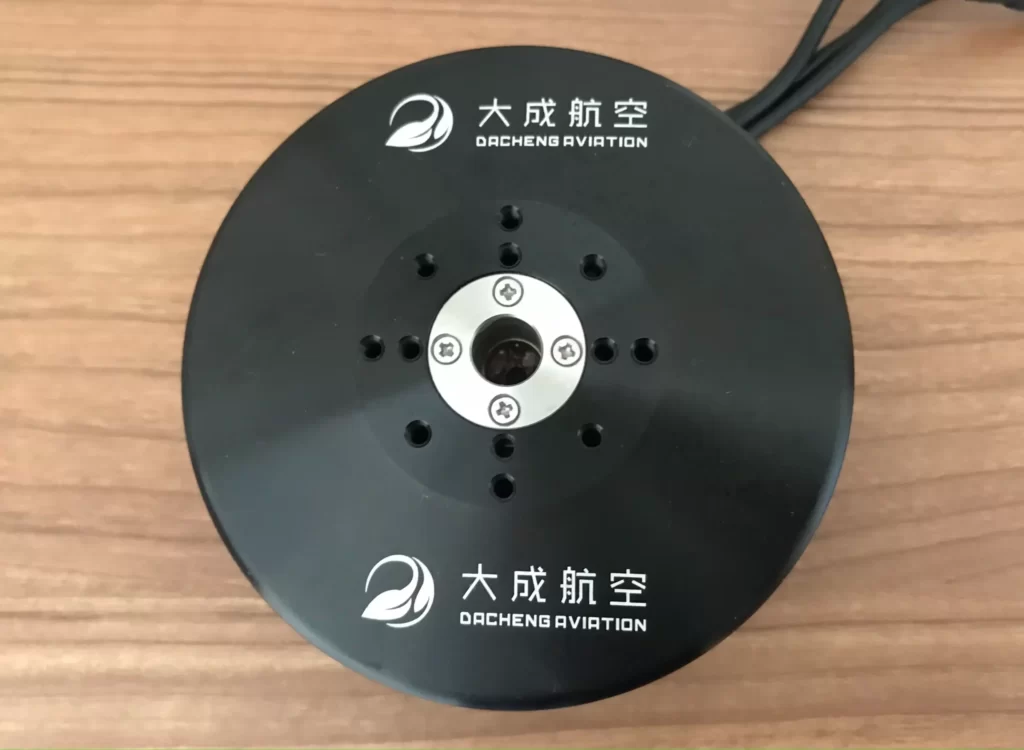
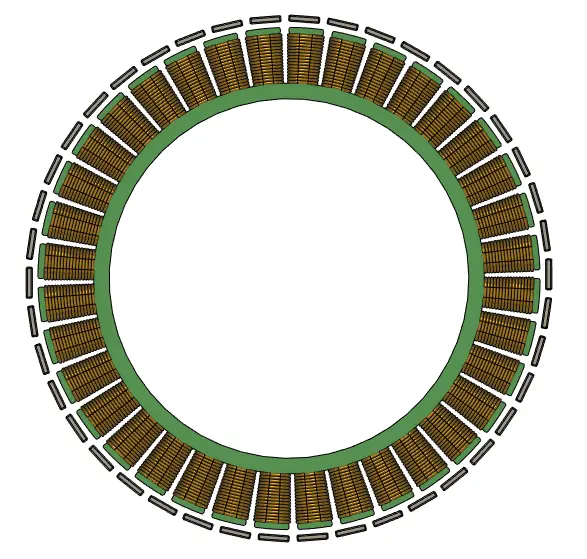
これは、アウターロータ型のブラシレスモータです。ロータは2つのベアリングと太い回転軸でステータが固定されている筐体と繋がれていました。取り外したところ、現れたステータが以下です。
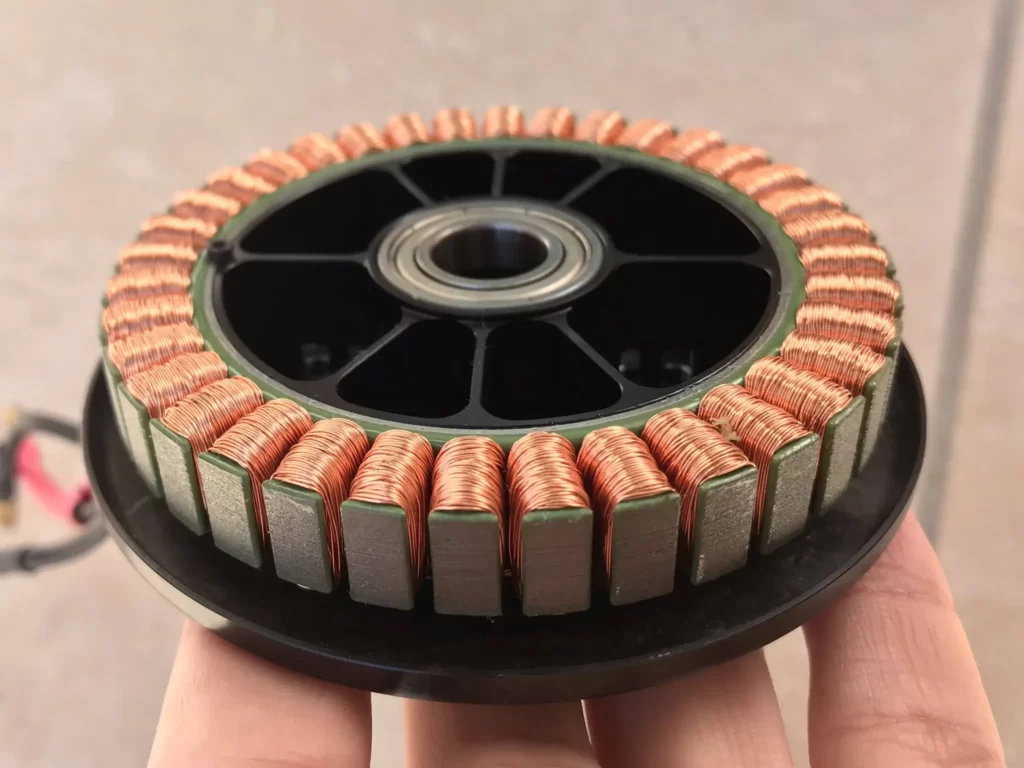
ポール数は36個です。

極数は42個です。
3相交流により回転を制御するため、コイルはUVWの3相により構成され、デルタ結線になっていました。各相のコイルの位置と極性について、直流を流しながら方位磁石を近づけて調査しました。結果、1つの相だけ取り出したときのコイルの配置と極性の関係は以下の図のようになります。
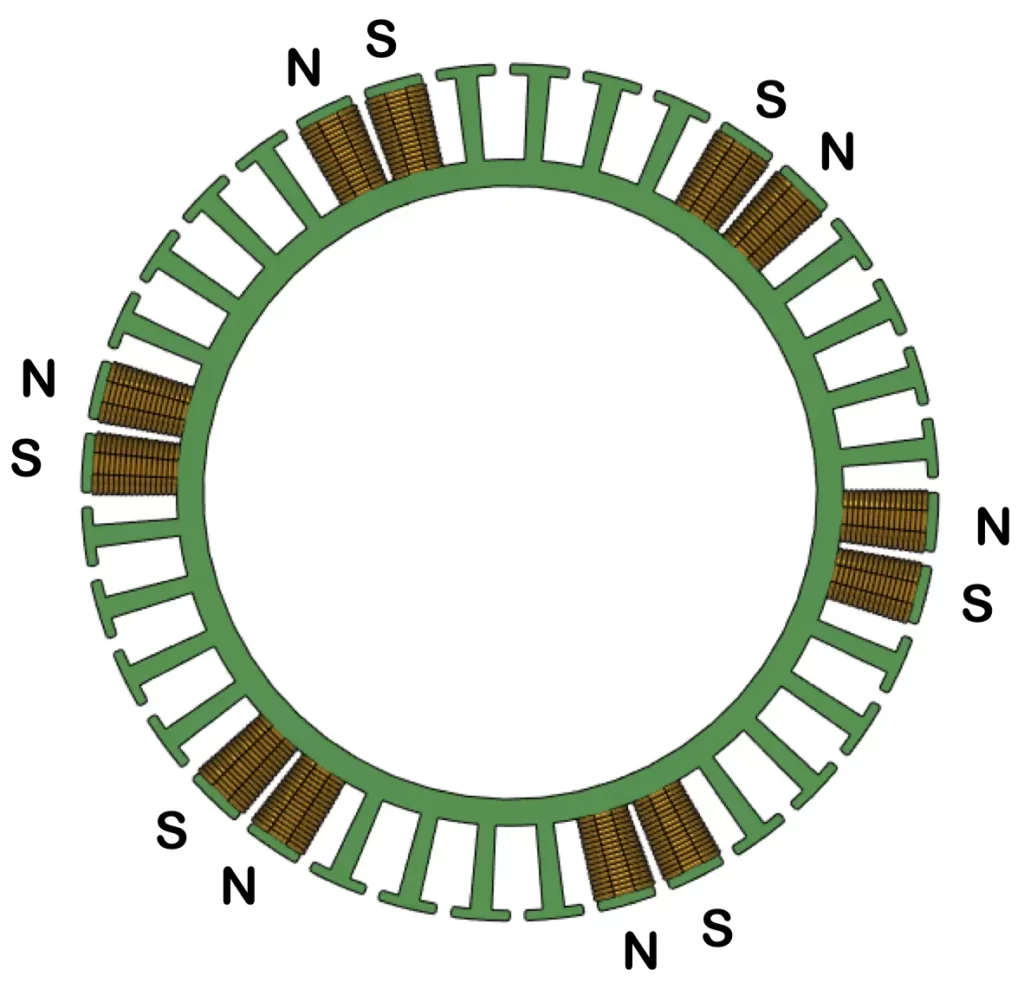
図において、緑色で塗られている部分がステータのコアになります。36ポールのうち、1つの相が使用するポール数は12個で、2ペアが6ヶ所配置されている形になっていました。直流を流したときの磁極の並びは、図に記載のようになっていました(流す直流電源の電流の向きを逆にすればSとNは交換されます)。
全てのポールにコイルを追加し、42個の磁石も追加したときの図も作成してみたので、以下に紹介します。
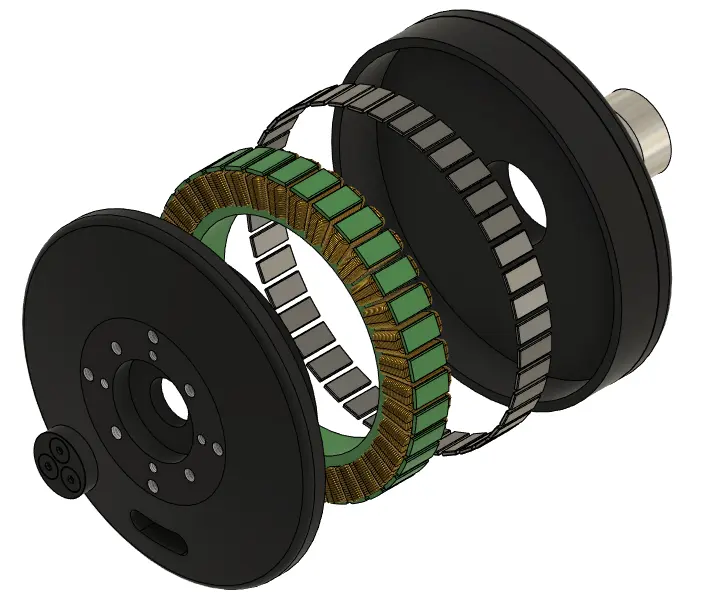
分解したブラシレスモータの全体をモデリングし、それを解体したときの画像です(完全に同じではありませんが)。