
今回は、RPLiDARの仕組みについて大まかな概要を知るために、RPLiDARの1つであるA2M8を分解してみようと思います。
※LiDARでよく使用されるToFなどについては触れません。
前回の記事では、RPLiDARの概要や種類について説明しましたので、気になる方はぜひ併せてお読みいただければと思います!

A2M8本体の分解
壊さない程度に分解して中身を覗いてみましょう。
まず、今回分解するRPLiDARのA2M8です。

裏にネジがあるので、すべてのネジを外して見ると、基板が現れます。

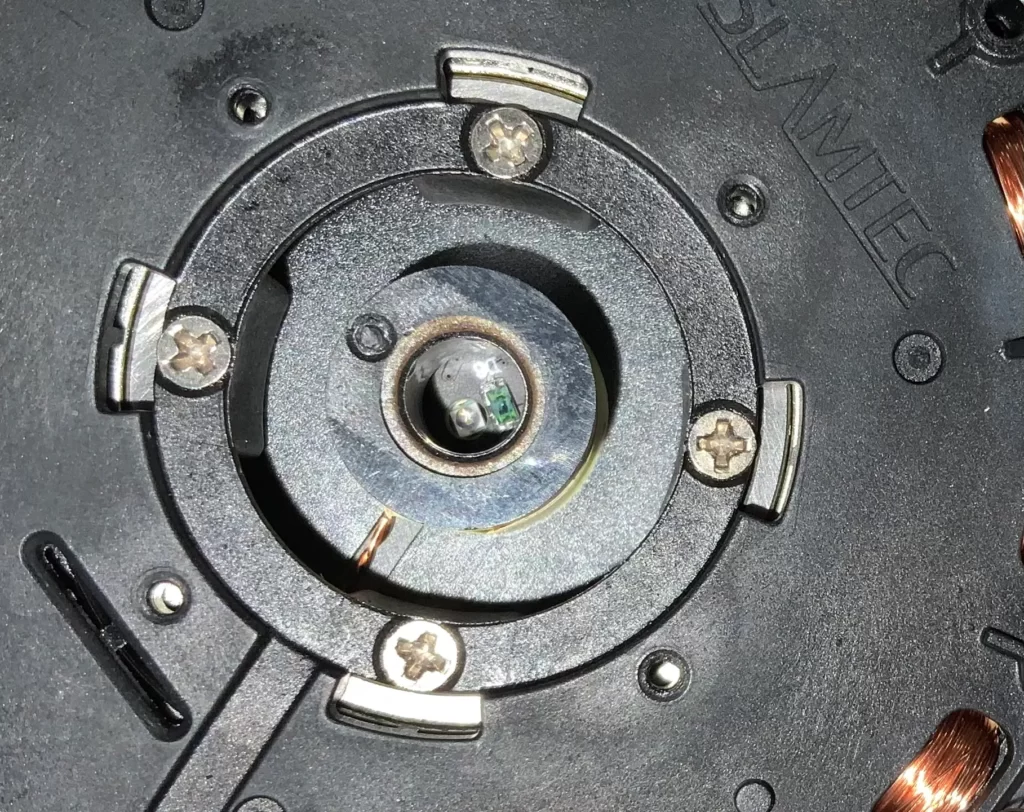
基板の周りの5つのネジと基板を固定する4つのネジを取り外すと、ブラシレスモータのコイルが出てきます。

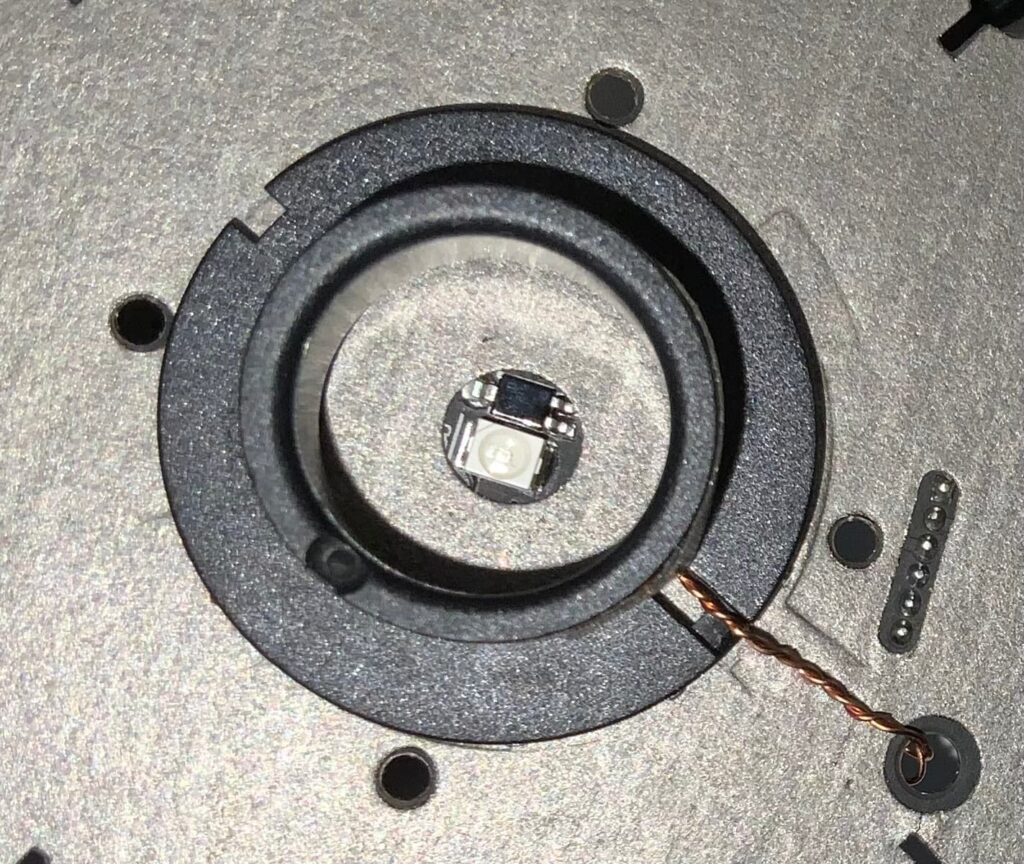
さらにネジを外して分解しようと考えていましたが、これ以上分解すると壊れてもとに戻らなくなりそうな気がしたので諦めましたが、面白い機構を見ることができました。まず、LiDARの上の部分は回転するのですが、その回転体の中にある回路への給電はワイヤレスで行われている可能性があるところです。右側の基板の裏についている黒い筒状のパーツにはコイルが巻かれています。この内側で回転体側のコイルが配置され、変圧器のような機構で電力を給電しているのではないでしょうか。そして、その筒の内側には、LEDやフォトトランジスタと思われるパーツが備え付けられており、こちらは光通信を用いて情報の通信を行っているのでしょう。この仮説が正しいことを検証したわけではありませんが、ノイズやロバスト性を考慮するとスリップリングよりもワイヤレス給電と光通信の方が相応しいと考えられるので、おそらく合っていると思われます。
通信インターフェースの分解
RPLiDARには下の写真のような通信インターフェースを用いてPCと接続します。

RPLiDAR本体からは5本の線(PWM,GND,TX,RX,5V)が出ており、通信インターフェースのコネクタと接続して使用します。
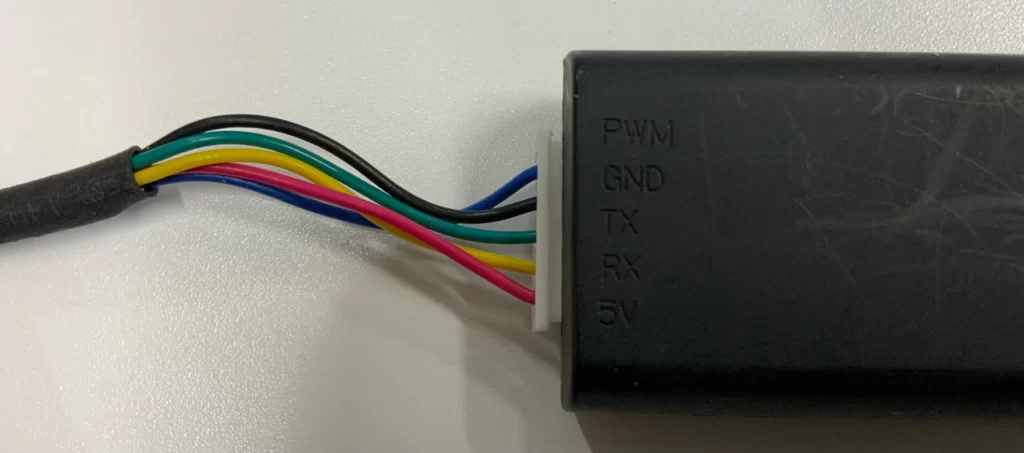
通信インターフェースには、その他に電源端子とmicro USB端子がついています。

電源端子から給電せずにUDBからの電力のみだとRPLiDARが動作しない、もしくは不安定になる可能性があるので、必ず電源端子から給電しましょう。
この通信インターフェースを分解すると、以下の写真のような回路がでてきます。
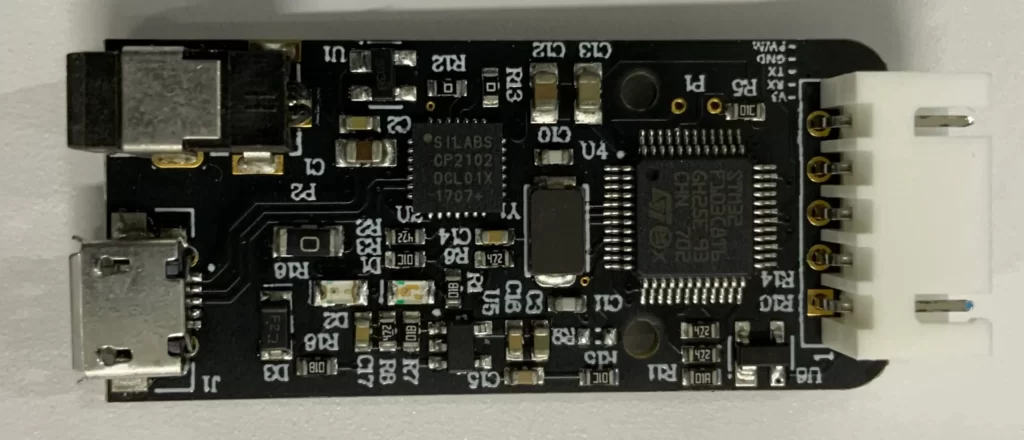
| USBシリアル変換IC | CP2102 |
| マイコン | STM32 |
主に使用されているICはUSBシリアル変換のためのSC2102と、STM32です。STM32の開発ボードやArduino(こちらはAVRですが)のような感じですね。
まとめ
RPLiDARはハードウェア部分と通信インターフェースからなり、ハードウェア部分は耐久性の高い構造を、通信インターフェース部分は小型のマイコンボードとして機能していることが確認できました。
