
3Dプリンタでブラシレスモータを作成してみたので、紹介します。
ちなみに、作成動画はYouTubeで公開しているので、ぜひみてみてください〜
とりあえず、3Dプリンタでブラシレスモータを作成するには、CADでモデリングする必要がありますので、Fusion360を使ってモデリングしていきます。
設計したブラシレスモータはエアギャップ型です。構造は小型の風力発電機などでよく使用されるエアギャップ発電機と同じですね。
組み立て前に、パーツを並べてみました。
左から順番に、ハウジング、ロータ、磁石、ステータの枠、回転軸、ベアリング、エナメル線です。12極3相9コイルモータです。
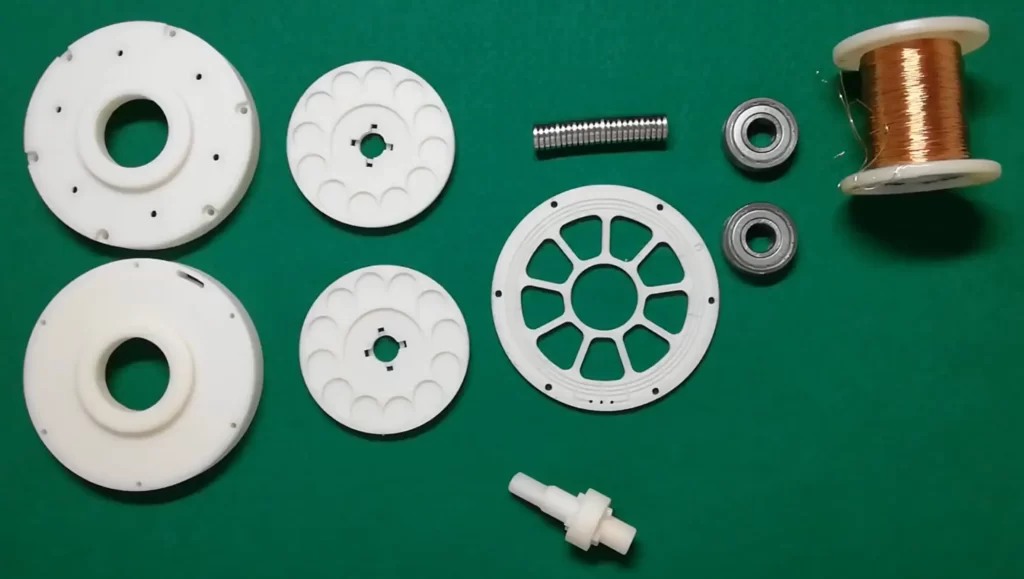
モータの効率を考えると、ロータ部分が鋼板だと磁気の無駄をなくせるんですが、今回は3Dプリンタで作成することに重点を置いているので、鋼板は使用せずに作成していきます。
作成手順は、
- ロータにネオジム磁石をエポキシ樹脂系接着剤を使って固定
- ステータを作成
- コイルの作成
- ステータの枠にコイルを仮配置して配線
- 空間をボンドで満たしコイルを枠に固定
- 組み立て
です。YouTube動画では、演出の関係もあって、手順が前後しています。
YouTubeに投稿した順番で紹介していきます。
まず、前後のハウジングにボールベアリングを固定します。このボールベアリングがしっかりフィットするようにパーツを造形するのが大変でした。
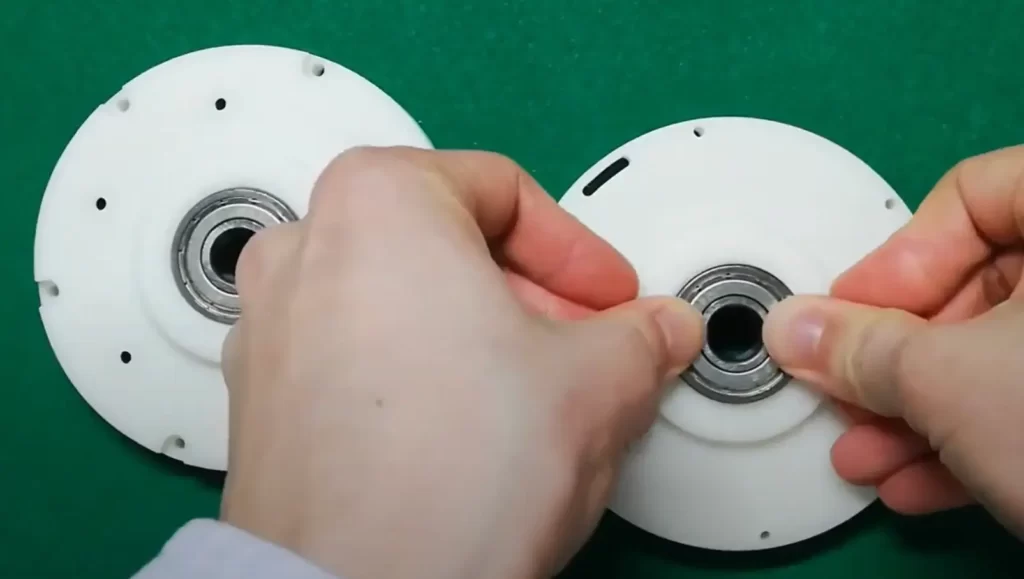
前方のハウジングにはモータを固定するときに使用するナットを埋め込みました。これは、かなりギリギリに設計したので、金槌で打ち込みました。

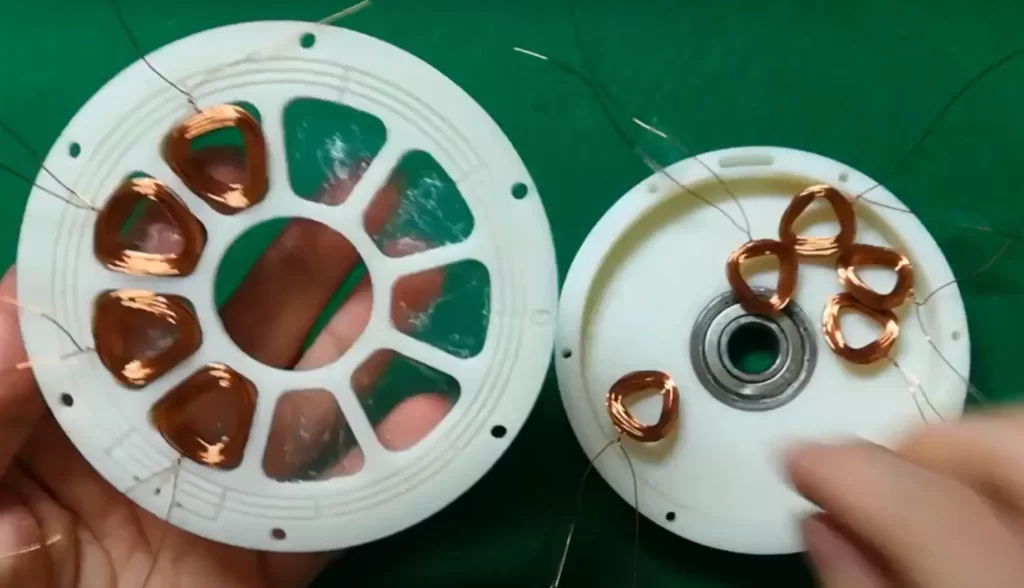
モータのステータの枠にコイルを固定します。ステータには、使わなくなったクリアファイルを円形に切り抜いたものを貼り付け、コイルを配置するところに軽く接着剤を塗っておきます。軽く塗っておくのは、仮設置をするためです。
全て並び終え、どのようにハンダ付けするか検討がついたところで、コイルを本格的に固定していきます。

ロータ部分を作成したときの写真がないので、省略しますが、これで組み立てるだけの段階になりました。
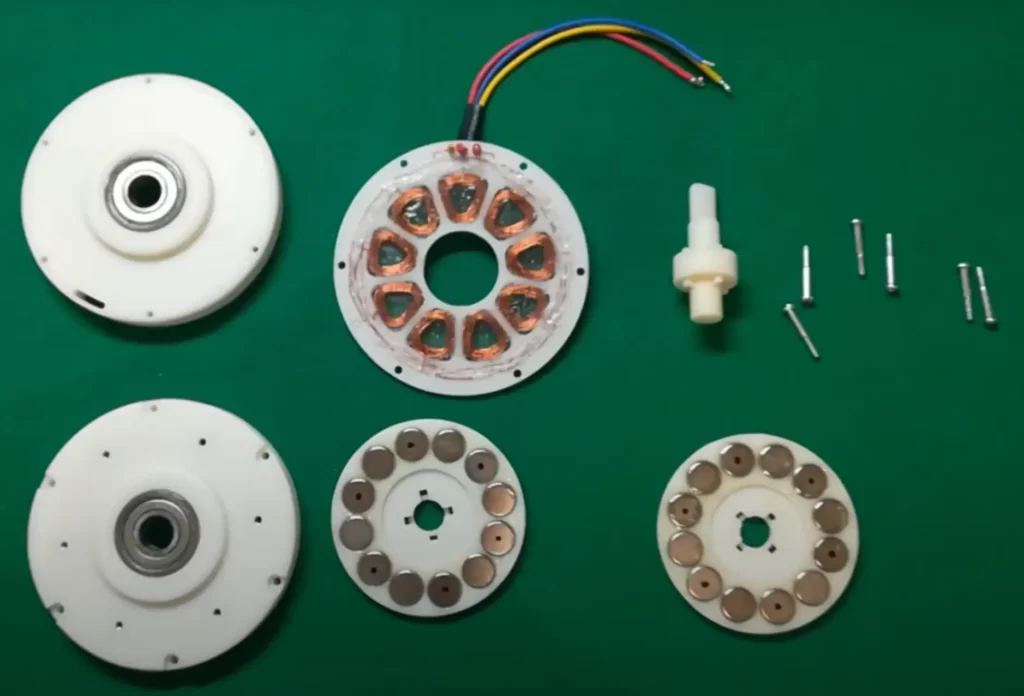
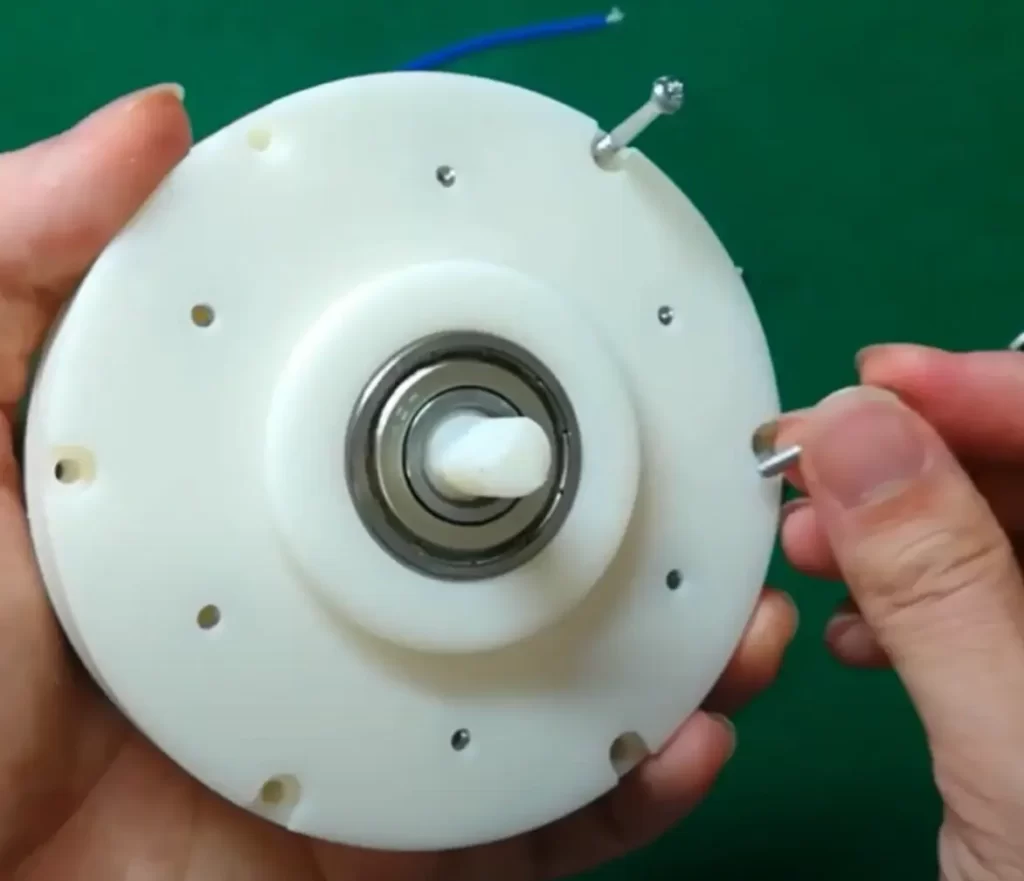
2枚の回転板のうち、一方に回転軸を固定します。回転板には回転軸が正確にはまるように、それぞれ長さが異なる4つのカットをつけています。

これを後ろのハウジングのボールベアリングに差し込みます。試しに指で回してみましたが、軸のブレはなくスムーズです。

次に、ステータをはめ込みます。3つの線を後ろのハウジングに通し、ネジ穴が合うように固定します。

もう一方の回転板を回転軸に固定します。

最後に、前のハウジングをはめ込み、ネジで固定します。
これが完成したものになります。
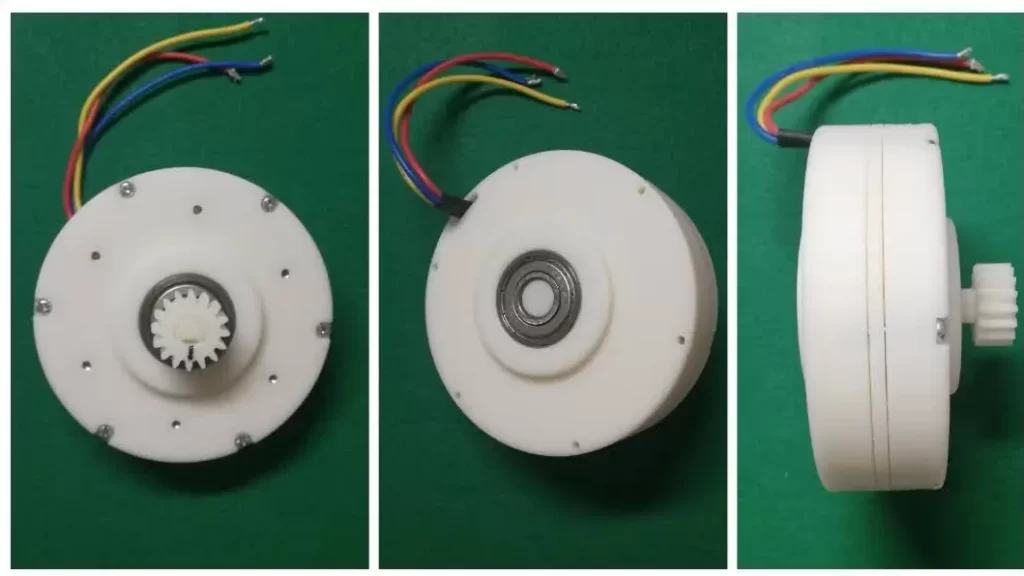
完成したものの回転動画もアップしているので紹介します。正直、ここまで高速回転させると壊れるんじゃないかと思いましたが、壊れなかったのでよかったです。
今後は、また別のブラシレスモータの製作に挑戦したいと思います。